La lección comienza con dos descripciones matemáticas equivalentes de las mediciones:
Las mediciones generales pueden describirse mediante colecciones de matrices — una para cada resultado de medición — que generalizan la descripción de las mediciones proyectivas.
Las mediciones generales pueden describirse como canales cuyas salidas son siempre estados clásicos (representados por matrices de densidad diagonales).
Restringimos nuestra consideración a mediciones con un número finito de resultados posibles.
Si bien es posible definir mediciones con infinitos resultados posibles, estas surgen con mucha menos frecuencia en el contexto de la computación y el procesamiento de información; ademas, requieren matemáticas adicionales (concretamente, teoría de la medida) para formalizarlas adecuadamente.
Inicialmente nos centramos en las llamadas mediciones destructivas, en las que el resultado de la medición es únicamente el valor clásico medido — sin especificación del estado post-medición del sistema medido.
Intuitivamente, podemos imaginar que dicha medición destruye el sistema cuántico en si, o que el sistema se descarta inmediatamente después de la medición.
Más adelante en la lección, ampliamos nuestra consideración a las mediciones no destructivas, en las que hay tanto un resultado clásico de medición como un estado post-medición del sistema medido.
Sea X un sistema a medir, y supongamos por simplicidad que el conjunto de estados clásicos de X es {0,…,n−1} para un entero positivo n, de modo que las matrices de densidad que describen estados cuánticos de X son matrices n×n.
Raramente necesitaremos referirnos a los estados clásicos de X, pero resulta conveniente hacer referencia a n, el número de estados clásicos de X.
Suponemos ademas que los posibles resultados de la medición son los enteros 0,…,m−1 para un entero positivo m.
Estos nombres son meramente por conveniencia; todo lo que sigue se generaliza fácilmente a otros conjuntos finitos de estados clásicos y resultados de medición renombrandolos apropiadamente.
Una medición proyectiva se describe mediante una colección de matrices de proyección que suman la matriz identidad.
En símbolos:
{Π0,…,Πm−1}
describe una medición proyectiva de X si cada Πa es una matriz de proyección n×n y se satisface la siguiente condición.
Π0+⋯+Πm−1=IX
Cuando dicha medición se realiza sobre un sistema X que se encuentra en el estado ∣ψ⟩, cada resultado a ocurre con probabilidad ∥Πa∣ψ⟩∥2.
El estado post-medición de X se obtiene normalizando el vector Πa∣ψ⟩, que por ahora ignoramos.
Cuando el estado de X se describe mediante una matriz de densidad ρ en lugar de un vector de estado cuántico ∣ψ⟩, la probabilidad del resultado a puede expresarse alternativamente como Tr(Πaρ).
Si ρ=∣ψ⟩⟨ψ∣ es un estado puro, las dos expresiones son iguales:
Aquí usamos la propiedad cíclica de la traza para la segunda igualdad y el hecho de que cada Πa es una matriz de proyección y por tanto satisface Πa2=Πa para la tercera igualdad.
Si ρ es en general una combinación convexa
ρ=k=0∑N−1pk∣ψk⟩⟨ψk∣
de estados puros, entonces la expresión Tr(Πaρ) coincide con la probabilidad promedio del resultado a, ya que esta expresión es lineal en ρ.
Una descripción matemática de las mediciones generales se obtiene relajando la definición de mediciones proyectivas.
Concretamente, permitimos que las matrices en la colección que describe la medición sean matrices positivas semidefinidas arbitrarias en lugar de proyecciones.
(Las proyecciones son siempre positivas semidefinidas; pueden definirse alternativamente como matrices positivas semidefinidas con valores propios exclusivamente en {0,1}.)
Una medición general de un sistema X con resultados 0,…,m−1 se especifica entonces mediante una colección de matrices positivas semidefinidas {P0,…,Pm−1} cuyas filas y columnas corresponden a los estados clásicos de X y que satisfacen la condición
P0+⋯+Pm−1=IX
Cuando el sistema X en el estado ρ se mide, cada resultado
a∈{0,…,m−1} ocurre con probabilidad Tr(Paρ).
Como naturalmente debemos exigir, el vector de probabilidades de los resultados
(Tr(P0ρ),…,Tr(Pm−1ρ))
de una medición general siempre forma un vector de probabilidad, para cualquier matriz de densidad ρ.
Las siguientes dos observaciones muestran que esto es efectivamente así.
Cada valor Tr(Paρ) es no negativo, ya que la traza del producto de dos matrices positivas semidefinidas cualesquiera es siempre no negativa:
Q,R≥0⇒Tr(QR)≥0.
Esto puede demostrarse, por ejemplo, utilizando las descomposiciones espectrales de Q y R junto con la propiedad cíclica de la traza: se expresa la traza del producto QR como una suma de números reales no negativos, que por tanto debe ser no negativa.
La condición P0+⋯+Pm−1=IX junto con la linealidad de la traza asegura que las probabilidades suman 1.
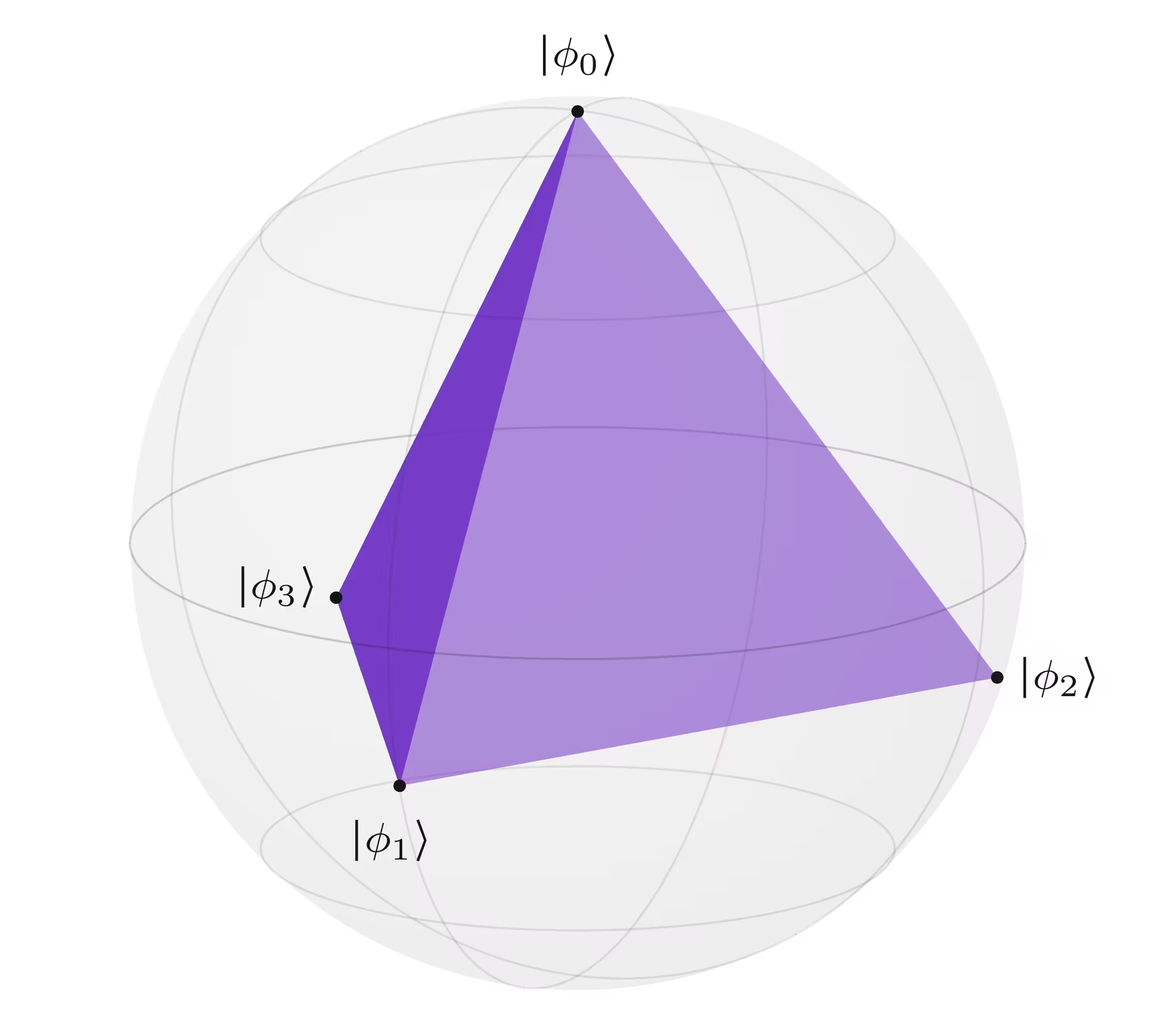
Sea X un qubit, y definamos dos matrices como sigue.
P0=(32313131)P1=(31−31−3132)
Ambas matrices son positivas semidefinidas: son hermíticas, y sus valores propios en ambos casos son 1/2±5/6, que son ambos positivos.
Ademas se cumple P0+P1=I, por lo que {P0,P1} describe una medición.
Cuando el sistema X en el estado ρ se mide con esta medición, la probabilidad del resultado 0 es Tr(P0ρ) y la del resultado 1 es Tr(P1ρ).
Si, por ejemplo, ρ=∣+⟩⟨+∣, las probabilidades de los resultados 0 y 1 son las siguientes:
Estos cuatro estados están distribuidos uniformemente en la esfera de Bloch: cada estado tiene la misma distancia a los otros tres, y los ángulos entre cualesquiera dos estados son siempre iguales.
Ahora definimos una medición {P0,P1,P2,P3} de un qubit estableciendo Pa para cada a=0,…,3 como sigue.
Pa=2∣ϕa⟩⟨ϕa∣
Que esto es una medición válida puede verificarse de la siguiente manera.
Cada Pa es obviamente positiva semidefinida, ya que es un estado puro dividido por dos.
Es decir, cada Pa es una matriz hermítica con un valor propio 1/2 y todos los demás valores propios iguales a cero.
La suma de estas matrices es la matriz identidad: P0+P1+P2+P3=I.
Esto puede verificarse fácilmente usando las representaciones de estas matrices como combinaciones lineales de matrices de Pauli.
Una segunda forma de describir las mediciones matemáticamente consiste en concebirlas como canales.
La información clásica puede considerarse como un caso especial de la información cuántica, identificando los estados probabilísticos con matrices de densidad diagonales.
Operativamente, podemos por tanto entender las mediciones como canales cuyas entradas son matrices que describen estados del sistema medido y cuyas salidas son matrices de densidad diagonales que describen la distribución resultante de los resultados de medición.
Veremos enseguida que cualquier canal con esta propiedad siempre puede escribirse en una forma simple y canónica que se relaciona directamente con la descripción de mediciones como colecciones de matrices positivas semidefinidas.
Recíprocamente, para cualquier medición dada como colección de matrices, siempre existe un canal válido con la propiedad de salida diagonal que describe la medición dada según el párrafo anterior.
De estas observaciones se deduce que las dos descripciones de mediciones generales son equivalentes.
Antes de continuar, seamos más precisos: cuál es la medición, cómo la concebimos como canal, y qué suposiciones hacemos.
Como antes, suponemos que X es el sistema a medir y que los posibles resultados de medición son los enteros 0,…,m−1 para un entero positivo m.
Sea Y el sistema que almacena los resultados de medición; su conjunto de estados clásicos es por tanto {0,…,m−1}, y representamos la medición como un canal Φ de X a Y.
Nuestra suposición es que Y es clásico — es decir, independientemente del estado en que se encuentre X al inicio, el estado resultante de Y siempre está representado por una matriz de densidad diagonal.
Podemos expresar en términos matemáticos que la salida de Φ es siempre diagonal de la siguiente manera.
Primero, definamos el canal completamente defasante Δm sobre Y.
Δm(σ)=a=0∑m−1⟨a∣σ∣a⟩∣a⟩⟨a∣
Este canal es análogo al canal completamente defasante de qubit Δ de la lección anterior.
Como aplicación lineal, establece todas las entradas fuera de la diagonal de una matriz de entrada en cero y deja la diagonal sin cambios.
Una forma simple de expresar que una matriz de densidad dada σ es diagonal es:
σ=Δm(σ).
En otras palabras: poner a cero todas las entradas fuera de la diagonal de una matriz de densidad no tiene efecto si y solo si esas entradas eran todas cero desde el principio.
El canal Φ satisface nuestra suposición — que Y es clásico — si y solo si
Φ(ρ)=Δm(Φ(ρ))
para toda matriz de densidad ρ que describe un estado de X.
Para las mismas matrices P0,…,Pm−1, el canal Φ puede expresarse como sigue.
Φ(ρ)=a=0∑m−1Tr(Paρ)∣a⟩⟨a∣
Esta expresión coincide con nuestra descripción de mediciones generales mediante matrices: cada resultado de medición ocurre con probabilidad Tr(Paρ).
Ahora verificamos que las dos propiedades que la colección de matrices {P0,…,Pm−1} debe satisfacer para una medición general se cumplen efectivamente.
La primera propiedad es que todas las matrices son positivas semidefinidas.
Esto se deduce del hecho de que para cualquier vector ∣ψ⟩ con entradas correspondientes a los estados clásicos de X se tiene:
Ahora verificamos que para una colección arbitraria {P0,…,Pm−1} de matrices positivas semidefinidas que satisfacen P0+⋯+Pm−1=IX, la aplicación definida por
Φ(ρ)=a=0∑m−1Tr(Paρ)∣a⟩⟨a∣
es efectivamente un canal válido de X a Y.
Una forma de hacerlo es calcular la representación de Choi de esta aplicación.
La transpuesta de cada Pa aparece en la tercera igualdad porque
⟨c∣Pa∣b⟩=⟨b∣PaT∣c⟩.
Esto permite que aparezcan las expresiones ∣b⟩⟨b∣ y ∣c⟩⟨c∣, que al sumar sobre b y c respectivamente se simplifican a la matriz identidad.
Dado que P0,…,Pm−1 son positivas semidefinidas por hipótesis, también lo son P0T,…,Pm−1T.
En particular, la transpuesta de una matriz hermítica es nuevamente una matriz hermítica, y los valores propios de una matriz cuadrada y su transpuesta siempre coinciden.
De esto se deduce que J(Φ) es positiva semidefinida.
Tomar la traza parcial sobre el sistema de salida Y (el sistema derecho) da
Supongamos que varios sistemas se encuentran juntos en un estado cuántico, y se realiza una medición general sobre uno de los sistemas.
Esto produce uno de los resultados de medición, elegido aleatoriamente con probabilidades determinadas por la medición y el estado del sistema antes de la medición.
El estado resultante de los sistemas restantes depende entonces, en general, de que resultado de medición se obtuvo.
Examinemos cómo funciona esto para un par de sistemas (X,Z) cuando se mide el sistema X.
(Llamamos al sistema derecho Z porque reservamos Y para el sistema que representa la salida clásica de la medición cuando la consideramos como un canal.)
Posteriormente, esto se generaliza fácilmente al caso en que los sistemas están intercambiados o hay tres o más sistemas.
Sea el estado de (X,Z) antes de la medición descrito por una matriz de densidad ρ, que podemos escribir como sigue.
ρ=b,c=0∑n−1∣b⟩⟨c∣⊗ρb,c
En esta expresión suponemos que los estados clásicos de X son 0,…,n−1.
Suponemos que la medición se describe mediante la colección de matrices
{P0,…,Pm−1}.
Esta medición puede describirse alternativamente como un canal Φ de X a Y, donde Y es un nuevo sistema con conjunto de estados clásicos {0,…,m−1}.
La acción de este canal puede expresarse concretamente como sigue.
Dado que estamos considerando una medición del sistema X, las probabilidades de los distintos resultados de medición solo pueden depender del estado reducido ρX de X.
En particular, la probabilidad de cada resultado a∈{0,…,m−1} puede expresarse de tres formas equivalentes.
Tr(PaρX)=Tr(PaTrZ(ρ))=Tr((Pa⊗IZ)ρ)
La primera expresión representa la probabilidad del resultado a de forma natural, basandose en lo que ya sabemos sobre mediciones en un solo sistema.
La segunda expresión se sigue directamente de la definición ρX=TrZ(ρ).
La tercera expresión requiere un poco más de reflexion — y te invitamos a convencerte de que es verdadera.
Aquí hay una pista: la equivalencia entre la segunda y la tercera expresión no depende de que ρ sea una matriz de densidad o de que cada Pa sea positiva semidefinida. Intenta demostrarlo primero para productos tensoriales de la forma ρ=M⊗N, y luego concluye por linealidad para el caso general.
Aunque la equivalencia entre la primera y la tercera expresión no es inmediatamente obvia, resulta plausible.
Partiendo de una medición sobre X, definimos efectivamente una medición de (X,Z) en la que simplemente descartamos Z y medimos X.
Como cualquier medición, esta nueva medición puede describirse mediante una colección de matrices, y no es sorprendente que esta medición se describa mediante la colección
{P0⊗IZ,…,Pm−1⊗IZ}
Estados condicionados a los resultados de medición
Si deseamos determinar no solo las probabilidades de los distintos resultados, sino también el estado resultante de Z condicionado a cada resultado de medición, podemos utilizar la descripción de la medición como canal.
En particular, consideramos el estado que obtenemos al aplicar Φ a X y dejar Z sin cambios.
como los que conocimos en la lección sobre matrices de densidad.
Para cada resultado de medición a∈{0,…,m−1} se cumple: con probabilidad
p(a)=Tr((Pa⊗IZ)ρ)
Y se encuentra en el estado clásico ∣a⟩⟨a∣ y Z en el estado
σa=Tr((Pa⊗IZ)ρ)TrX((Pa⊗IZ)ρ).(2)
Esta es la matriz de densidad que obtenemos normalizando
TrX((Pa⊗IZ)ρ)
dividiendo por su traza.
(Formalmente, el estado σa solo está definido cuando la probabilidad p(a) es distinta de cero; si p(a)=0, este estado es irrelevante, ya que se refiere a un evento discreto con probabilidad cero.)
Naturalmente, las probabilidades de los resultados son consistentes con nuestras observaciones anteriores.
En resumen, cuando se realiza la medición {P0,…,Pm−1} sobre X mientras (X,Z) se encuentra en el estado ρ:
Cada resultado a ocurre con probabilidad p(a)=Tr((Pa⊗IZ)ρ).
Condicionado al resultado a, el estado de Z viene dado por la matriz de densidad σa de la ecuación (2), obtenida normalizando TrX((Pa⊗IZ)ρ).
Esta descripción puede adaptarse a otras situaciones, como cuando el orden de los sistemas está invertido o cuando hay tres o más sistemas.
Conceptualmente es sencillo, aunque las fórmulas pueden volverse engorrosas.
En general, si tenemos r sistemas X1,…,Xr, el estado del sistema compuesto (X1,…,Xr) es ρ, y se realiza la medición {P0,…,Pm−1} sobre Xk, se cumple lo siguiente.
Cada resultado a ocurre con probabilidad
p(a)=Tr((IX1⊗⋯⊗IXk−1⊗Pa⊗IXk+1⊗⋯⊗IXr)ρ).
Condicionado al resultado a, el estado de (X1,…,Xk−1,Xk+1,…,Xr) viene dado por la siguiente matriz de densidad: